SRT gives nothing useful in the kinematics and for dynamical concepts as well.
It occurs that all this huge number of additional complications arises only
because of the fact, that the electromagnetic Lorentz force too "complicatedly"
depends on the velocity (and on acceleration as well, if we will try to reduce
its effect to the classical Newtonian second law)?! We will make a light
lyrical digression. On what values can forces be dependent (and, from a
conceptual point of view, in what a matter does the distinction of Newton's
approach from the Aristotelian one lie)? An interaction of bodies leads to a
change of the bodies' state. It is necessary to choose an "indicator" of this
change. Aristotel believed the rest as the basis state, and he chose to observe
the velocity of body's motion, as an indicator, i.e. ![]() (Aristotel connected the value of
(Aristotel connected the value of ![]() with a force, provoking motion).
The choice
with a force, provoking motion).
The choice ![]() is quite sufficient, if we will be satisfied with
contemplation. However, if we would try to construct the dynamics of motion, so,
after mental Galilean experiment, it became clear that the Aristotelian concept
of the force was not conformed to the Reality. Though, strictly speaking, this
conclusion is tied to the faith of relativists of "the first wave" - Galilean
followers - in existence of empty space (Galilei by itself considered isolated
identical systems only and, by contrast to his "pseudo-followers", he not
disseminated his principle to mutually penetrating reference systems). If ether
exists, the Aristotelian rest is locally tied to the ether, which has no
necessity to be "uniformly immovable" as a whole at all, but can participate in
complex vortical movements. For example, there exists the theory of vortical
dynamics of the solar systems, and a force is only required to maintain motion,
which is differ from equilibrium one. However, the analysis of vortical dynamics
is not included in the book plan, and so, we will use the statements generally
accepted in the present state. The Newtonian choice for the description of bodies'
interaction is different - an "indicator" of change of body's state is
chosen its acceleration. Factually, the Newton second law presents a definition
of the notion of "a force", and, from a standpoint of functional dependence,
the force coincides with the acceleration within a dimensional factor (mass).
Ideally, this way of a motion description (in the habitual form) must be written
as
is quite sufficient, if we will be satisfied with
contemplation. However, if we would try to construct the dynamics of motion, so,
after mental Galilean experiment, it became clear that the Aristotelian concept
of the force was not conformed to the Reality. Though, strictly speaking, this
conclusion is tied to the faith of relativists of "the first wave" - Galilean
followers - in existence of empty space (Galilei by itself considered isolated
identical systems only and, by contrast to his "pseudo-followers", he not
disseminated his principle to mutually penetrating reference systems). If ether
exists, the Aristotelian rest is locally tied to the ether, which has no
necessity to be "uniformly immovable" as a whole at all, but can participate in
complex vortical movements. For example, there exists the theory of vortical
dynamics of the solar systems, and a force is only required to maintain motion,
which is differ from equilibrium one. However, the analysis of vortical dynamics
is not included in the book plan, and so, we will use the statements generally
accepted in the present state. The Newtonian choice for the description of bodies'
interaction is different - an "indicator" of change of body's state is
chosen its acceleration. Factually, the Newton second law presents a definition
of the notion of "a force", and, from a standpoint of functional dependence,
the force coincides with the acceleration within a dimensional factor (mass).
Ideally, this way of a motion description (in the habitual form) must be written
as ![]() . However, the problem of finding the
explicit expression for such the "ideal" forces
. However, the problem of finding the
explicit expression for such the "ideal" forces ![]() is
not yet solved for the case of arbitrary configurations and motions of a body,
a force source and a medium, for example, based on expressions for statical
forces. Nature does not easily unravel its secrets for us: instead of the ideal
expression for the force, we are obliged to use an expression that we found
is
not yet solved for the case of arbitrary configurations and motions of a body,
a force source and a medium, for example, based on expressions for statical
forces. Nature does not easily unravel its secrets for us: instead of the ideal
expression for the force, we are obliged to use an expression that we found
![]() . Thus, generally
speaking, the real forces should be determined from the experiment.
The following forces are known:
. Thus, generally
speaking, the real forces should be determined from the experiment.
The following forces are known:
and so on in quite various combinations. From the generalized expression
it is seen that any derivative, including the second one, is not distinguished
by anything, and only the experiment can determine the varieties of forces
realized in the nature (recall, for example, the formula with an acceleration
dependent force offered by Weber long before SRT). Here we are interested in
the fact that the relativistic equation of motion with the Lorentz force
![]() can be written as the classical second
Newton's law with the force
can be written as the classical second
Newton's law with the force ![]() .
Though, if one believes in the relativistic expression for forces, then, as an
alternative, it can be introduced transformations for components of the force,
longitudinal and perpendicular to body's velocity (but it does not worth to
introduce mythical longitudinal and transverse masses); or we can just write
the classical second Newton law F=ma and the
relationship of new force F and the static force
.
Though, if one believes in the relativistic expression for forces, then, as an
alternative, it can be introduced transformations for components of the force,
longitudinal and perpendicular to body's velocity (but it does not worth to
introduce mythical longitudinal and transverse masses); or we can just write
the classical second Newton law F=ma and the
relationship of new force F and the static force
![]() :
: ![]() .
One should not also exaggerate the possibilities of the methods for obtaining
expressions from the Lagrangian, since this function itself is determined
to an accuracy of some expansion terms and can not determinate the principles.
.
One should not also exaggerate the possibilities of the methods for obtaining
expressions from the Lagrangian, since this function itself is determined
to an accuracy of some expansion terms and can not determinate the principles.
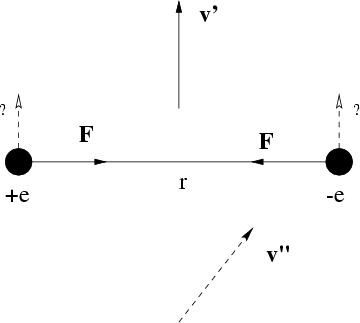
Completely unclear methodically looks in SRT the transformation of forces at
transition from one frame of reference to another. Let us consider, for example,
two identical in absolute value charges ![]() and
and ![]() being at distance
being at distance ![]() apart of each other (Fig. 4.2).
apart of each other (Fig. 4.2).
In the frame of reference bound with resting charges there exists the
electric force ![]() acting between the charges. Look now at the same
charges from the system moving at velocity
acting between the charges. Look now at the same
charges from the system moving at velocity ![]() perpendicular to the line
connecting the charges (in this system the charges are flying parallel to each
other). According to SRT [17,32], now between the charges acts the force
perpendicular to the line
connecting the charges (in this system the charges are flying parallel to each
other). According to SRT [17,32], now between the charges acts the force
To what physical quantity should be related the transformation factor ![]() ? The
charge is invariant in SRT. Distance
? The
charge is invariant in SRT. Distance ![]() , which is perpendicular to the motion,
does not change as well. So, do the forces really lose their physical causes
in SRT? Note one more strange thing: if the velocity of a observer
, which is perpendicular to the motion,
does not change as well. So, do the forces really lose their physical causes
in SRT? Note one more strange thing: if the velocity of a observer ![]() has a component along the line which connects the charges, the force acting on
the charges has a component which is perpendicular to this line (i.e. the
picture of motion is essentially changed).
has a component along the line which connects the charges, the force acting on
the charges has a component which is perpendicular to this line (i.e. the
picture of motion is essentially changed).
Completely groundless is Einstein's statement, that uncharged bodies must behave under an effect of forces in exactly the same manner as charged ones: all forces must be transformed identically. Still Poincare wrote that we can not arbitrarily "disconnect" some force from one body and arbitrarily "connect" it to the other body. If some force (for example, electrical) acts on some (charged) bodies and does not act at all on the other (uncharged) bodies, then, all the more, is not obvious that velocity dependencies should be identical in transformations of all forces. This is one more hypothesis not confirmed by anything even within the SRT framework. Probably, the transformation of forces has relation to only one particular case - the Lorentz force. And even in this case there are some nuances here. For example, at transition to a moving system the magnetic force magnitude can become zero. These facts represent the manifestations of conventional character of separating a single force into electrical and magnetic forces, don't they? In such a case, why the attention should be concentrated on the transformation of conventionally separated electrical and magnetic fields (and forces)?
Generally speaking, the idea that the same force can be different for different systems of observation is the flat nonsense for all experimental physics. Really, the way of writing arabic cipher on a dynamometer is independent on observer motion, i.e. readings of the dynamometer (fixing the force) will not be changed with observer motions. Any force acts between the "source" of this force and the concrete "object" of the applied force, and motion of some "strange eyes" has no relation at all (i.e. force can depends on the source properties, object properties, and their mutual motion).